Case Studies
 MIL testing involves using a mathematical model or simulation of a system component as the testing environment. This allows engineers to evaluate and validate the behavior and functionality of specific aspects of a system before the actual hardware implementation takes place.
MIL testing involves using a mathematical model or simulation of a system component as the testing environment. This allows engineers to evaluate and validate the behavior and functionality of specific aspects of a system before the actual hardware implementation takes place.
Driving simulators have boosted the vehicle design with the introduction of human beings in the simulation loop. For a realistic functioning, the steering system must provide an accurate behaviour, since the hand wheel is a crucial human interface. Despite a large diffusion of steering models, this paper deals with the creation of a specific solution for real-time applications, characterized by precise features as numerical stability and low computational cost.
The mechanical model is composed by two DOF:
The first one composed by the: steering wheel, steering column and hooke joints
The second one is composed by the pinion, rack and tie rods.
The two lumped mass are connected by the torsion bar modelled as a simple torsional spring and damper.
The HPS is modelled by a simple function in two variables which are the torsion bar torque and vehicle velocity plus a first order delay to approximate the system dynamic response.
 SIL testing involves the evaluation and validation of software components within a simulated environment before their integration into the actual hardware. This methodology allows developers to thoroughly assess the performance, functionality, and reliability of software elements in a controlled virtual setting
SIL testing involves the evaluation and validation of software components within a simulated environment before their integration into the actual hardware. This methodology allows developers to thoroughly assess the performance, functionality, and reliability of software elements in a controlled virtual setting
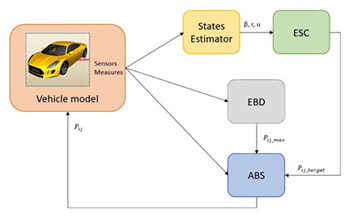
Trying to empower the performance offered by our Corner Brake Actuators, we decided to study and implement a custom ABS logic.
This being the case, we developed three different ABS algorithms, progressively increasing the level of complexity involved.
Then, the effect of each one was assessed on a virtual environment (M42 Hardware and Human in the Loop steering bench) in different cases.
Longitudinal and combined braking conditions, in both low and optimal road-tire adherence circumstances, were examined.
 VIL testing involves the integration of a physical vehicle or its subsystems with a virtual environment, allowing for the comprehensive testing of electronic control systems, software algorithms, and hardware components. This methodology is instrumental in assessing the performance and interoperability of these systems in a controlled and repeatable setting.
VIL testing involves the integration of a physical vehicle or its subsystems with a virtual environment, allowing for the comprehensive testing of electronic control systems, software algorithms, and hardware components. This methodology is instrumental in assessing the performance and interoperability of these systems in a controlled and repeatable setting.
In the second study, the EPS system of a production vehicle was reverse-engineered and the manufacturer control logic was by-passed without affecting the functionality of the other units.
By doing so, we were able to develop dedicated (proprietary) algorithms and master the dynamic behaviour of the vehicle in transient maneuvers.
A crucial aspect of the entire work consist in the fact that the whole development process has been executed on the real HW unit, but in a virtual environment (Hardware and Human in the Loop steering bench, HiLDyS test bench).
Once the development process was deemed complete, the vehicle has been involved in road tests and demonstrations.
Just to give some examples, the vehicle was used in the 2018 VI-grade USERS CONFERENCE and the MASA event.
The effectiveness of the system, in terms of collision avoidance and drift control manoeuvres, has hence been proved on a real environment (proving ground).
It is fundamental to highlight that no further tuning of the system turned out to be necessary, corroborating the extremely high level of accuracy these technologies can assure.
 HIL testing involves connecting a system under development, such as electronic control for a vehicle or an industrial control system, to a real-time simulator. The simulator replicates the behavior of the surrounding system and provides realistic inputs to the development system.
HIL testing involves connecting a system under development, such as electronic control for a vehicle or an industrial control system, to a real-time simulator. The simulator replicates the behavior of the surrounding system and provides realistic inputs to the development system.
It enables testing in a controlled and repeatable environment, reproducing complex scenarios and operating conditions challenging to achieve in real-world tests. In addition, it allows to minimize the need for expensive hardware prototypes to test software, allowing the identification and resolution of issues during the development phase.
HIL testing has become a crucial element in the development of complex systems, providing a more efficient and reliable approach to verifying the functionality and performance of embedded systems.
The aim of this first activity was to calibrate the bench at best.
Then, starting from this calibration of the EPSiL bench, a new steering rack has been developed and fine-tuned. The calibration was performed using numerical evaluation and the human perception of a real professional driver.
The aim of the second study was to model and test an innovative AEB control logic that will increase system reliability by compensating for the non-immediate response of brake system to brake requests.
The effectiveness of the control logic has been tested on two different braking system:
Two CBAs ,installed on an experimental vehicle, were directly integrated into the simulation loop.
A stock brake system unit integrated into the static simulator.
Hardware in the loop technique has been fundamental to reproduce as accurately as possible the response of the braking system to AEB intervention.
The developed controller demonstrates high reliability as it guarantees the same performance acting on two different brake systems without the need of tuning activities.



